
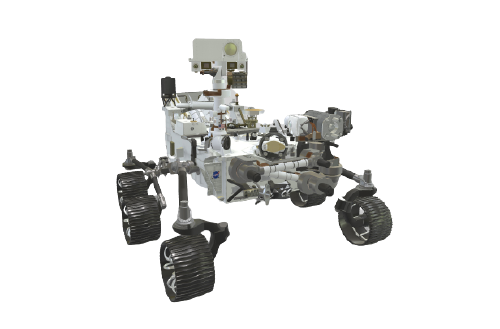
Rover Vajra
- Six-wheeled design with custom rocker-bogie suspension
- Low center of gravity for enhanced stability and maneuverability
- 5-DOF robotic manipulator with precision end effectors
- Autonomous navigation system for uncertain terrains
- Advanced path planning and obstacle avoidance
ROVER VAJRA
OVERVIEW
| DIAMETER | 1 m / 1 ft |
| HEIGHT | 1 m / 1 ft |
| MASS | 2 kg / 2 lb |
| PAYLOAD TO GTO | 1 kg / 1 lb |
| PAYLOAD TO LEO | 1 kg / 1 lb |
| PAYLOAD TO MARS | 1 kg / 1 lb |
ROVER VAJRA
OVERVIEW
| NUMBER OF ENGINES | 1 |
| THRUST AT SEA LEVEL | 1 kN / 1 lbf |
| THRUST IN VACUUM | 1 kN / 1 lbf |
ROVER VAJRA
OVERVIEW
ROVER VAJRA
OVERVIEW
ROVER VAJRA
OVERVIEW
| BURN TIME | 1 sec |
| NUMBER OF ENGINES | 1 |
| THRUST | 1 kN / 1 lbf |
ROVER VAJRA
OVERVIEW
| DIAMETER | 1 m / 1 ft |
| HEIGHT | 1 m / 1 ft |